 一切都来自于在中国购买的中国产品点评网站
一切都来自于在中国购买的中国产品点评网站
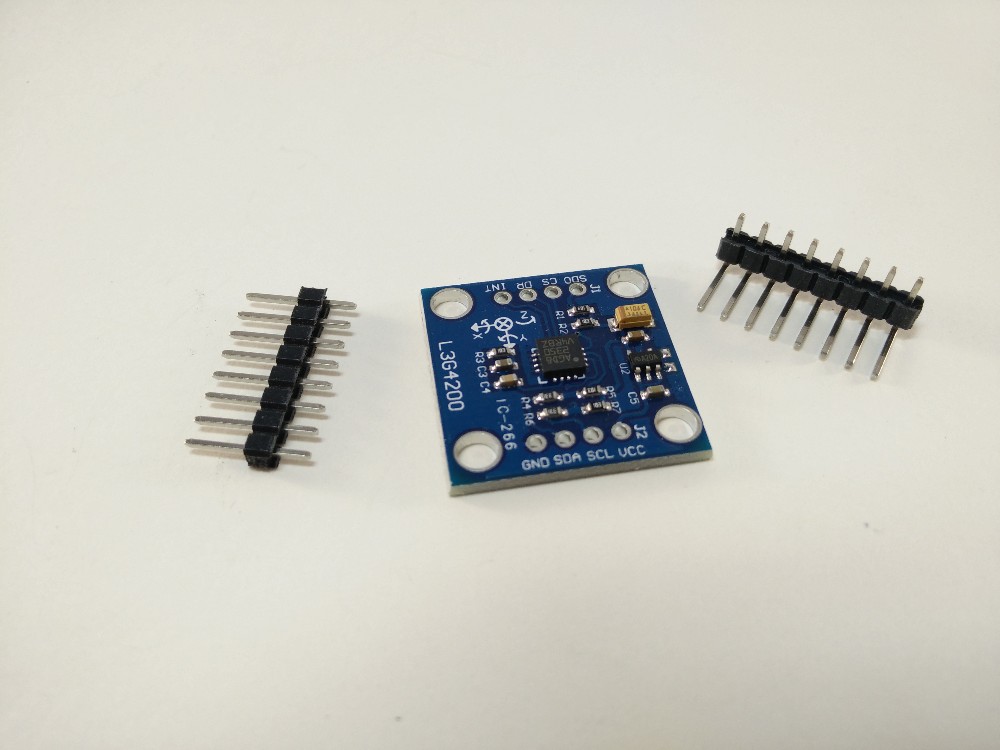
我想买一些之前的陀螺, 但无济于事. 这种模式, 的 与 L3G4200D GY 50 是工作的第一个. 用 Arduino 测试.

配备了桨, 那里有两个连接器选项要士兵.
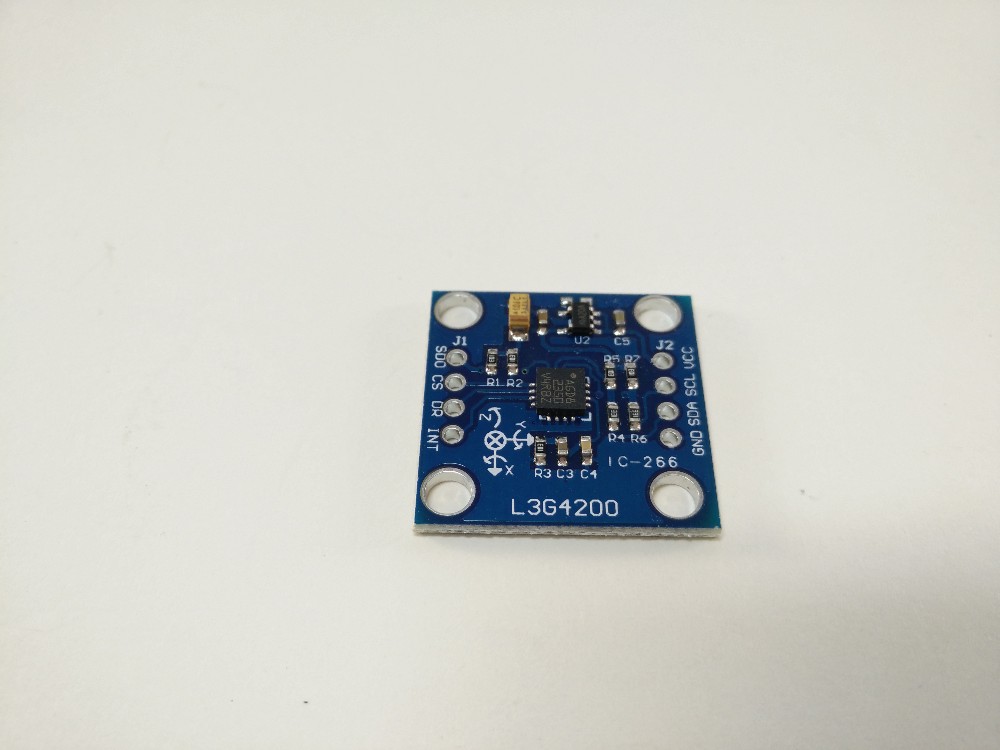
你可以看到在轴线角阅读下面的图像 x, y 和 z.
板的背面有什么!
下面是与这些兵卡和连接到 Arduino Uno. 我做了这些角度对陀螺仪测量表, 在案件只在 y 轴. 为此,我使用 图书馆 Pololu L3G 和它附带的示例程序.
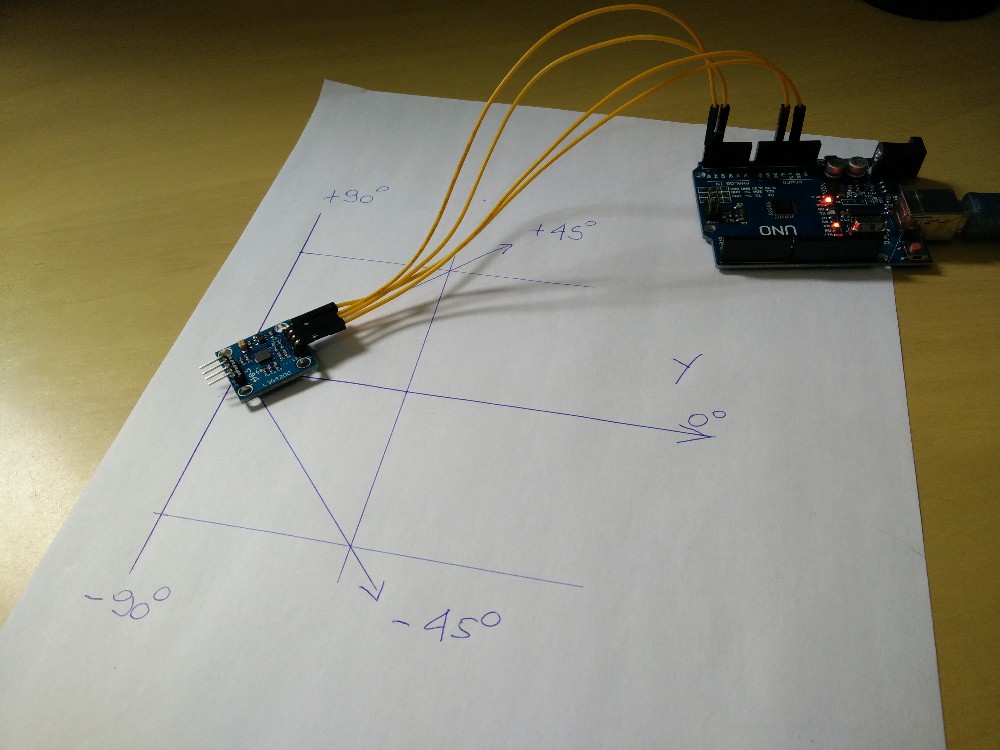
如果我把 Arduino 与支持的标签 0 学位, 然后打开 45 学位, 你可以阅读在 y 轴上角, 下面的图片中偏航:
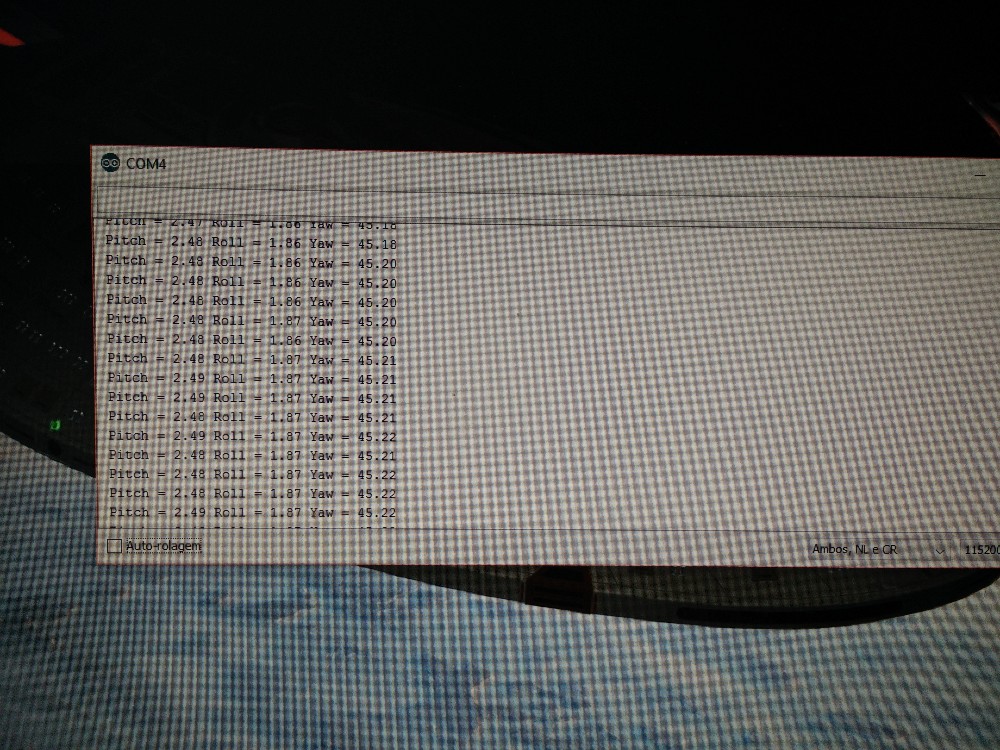
看的影带显示经验:
我真的很喜欢的产品,现在我要买一些引擎做项目. 我去看看也买加速度计来完成我的发明. 我离开下面的链接到陀螺仪:
http://3-axis--gyro-sensor-digital-module-for-arduino-148,731 www.dx.com/p/gy-50-l3g4200d



你能递给我代码吗?
谢谢你.
代码是附带的库的示例. 你可以下载在图书馆 https://github.com/pololu/l3g-arduino.